LTE筆記: Cellular V2X之技術與標準演進
(2018.07.16_3GPP標準會議現況與趨勢研討會 - 工研院 蔡華龍 博士)
以市場面來說, V2X 可以分成兩大陣營,
美國立法以 DSRC 為車載網路的規範,
中國考慮到 DSRC 專利佈局, 則以 Cellular V2X 為主,
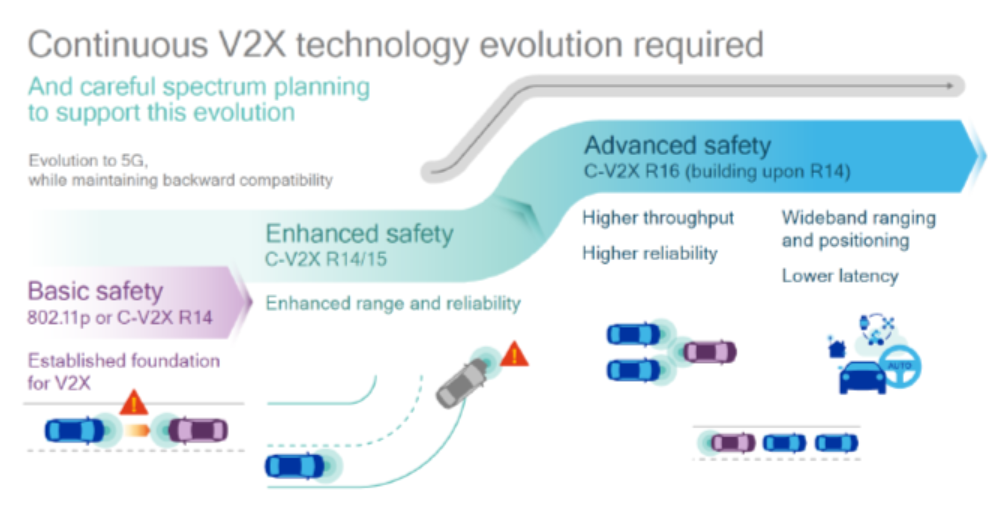
以通訊協定發展來說, Cellular V2X 從 D2D 出發,
同時考慮到 V2X 有專屬的 side-link 頻帶 (5.9 GHz),
打破 Cellular V2X 最大限制 (只可用上行的頻帶),
因此, 相較 D2D 以 public safety 的有限應用情境,
V2X 擁有更大的商用可能性.

目前已有 Cellular V2X 的晶片組 (9150),
主要是支援 side-link 的通訊, V2I 的通訊著墨較少,
然而, 目前公開資訊較少, 無法取得該晶片的詳細資訊,
LTE 在定義 V2X 網路時, 著重在 V2V 的網路設定,
相較於 LTE 網路的的省電要求, V2V 重視通訊的 QoS,
舉例來說, 在 LTE V2X 下, 定義車行速度為 140 km/hr,
也就是相行速度可達 280 km/hr, (NR 目標為 500 km/hr)
為了達成此通訊需求, 最後則是增加 DMRS (Demodulation Reference Sgnal),
來解決此問題, 此外, 同步也是一個問題, 可以參考上一篇文章,
V2X 按照定義有以下四種應用情境:

其中, Platooning 和 Extended sensors 會是比較早期的應用,
(Platooning 為車行之間的資訊串流, 如大貨車間的資訊傳輸)
也是 LTE V2X 較有可能的應用, (R15 主要改進 CA, 64-QAM, CDD-MIMO)
而 Advanced driving 和 Remote driving 由於 V2I 和 QoS 的要求, 可能要到 NR V2X,
另一個有趣的應用情境, 則是使用 V2X 的環境來提供移動基地台的覆蓋,

對於 NR V2X 而言, 有以下的技術趨勢:
1. 自駕車的圖資傳輸: 提供自駕車的圖資或是深度學習模型更新
2. 車輛的無盲點定位: 0.5公尺精確度, 100 km/hr 用來做資源分配與預警
3. 在 side-link 架構下的 unicast, multicast, H-ARQ
4. 和 DSRC 的整合 (R16)
Note: 對定位的應用而言,
目前 LTE 定位精確度為 10 公尺, 在 NR 架構下, 約略可以到達 1 公尺,
GPS 的架構下, 最高精確度可以達成公分等級定位,
但是需時間較長, 同時, 也要考慮移動性的支援,
最後的應用應該會是整合 (hyper) 的定位方案.
以市場面來說, V2X 可以分成兩大陣營,
美國立法以 DSRC 為車載網路的規範,
中國考慮到 DSRC 專利佈局, 則以 Cellular V2X 為主,
以通訊協定發展來說, Cellular V2X 從 D2D 出發,
同時考慮到 V2X 有專屬的 side-link 頻帶 (5.9 GHz),
打破 Cellular V2X 最大限制 (只可用上行的頻帶),
因此, 相較 D2D 以 public safety 的有限應用情境,
V2X 擁有更大的商用可能性.
目前已有 Cellular V2X 的晶片組 (9150),
主要是支援 side-link 的通訊, V2I 的通訊著墨較少,
然而, 目前公開資訊較少, 無法取得該晶片的詳細資訊,
LTE 在定義 V2X 網路時, 著重在 V2V 的網路設定,
相較於 LTE 網路的的省電要求, V2V 重視通訊的 QoS,
舉例來說, 在 LTE V2X 下, 定義車行速度為 140 km/hr,
也就是相行速度可達 280 km/hr, (NR 目標為 500 km/hr)
為了達成此通訊需求, 最後則是增加 DMRS (Demodulation Reference Sgnal),
來解決此問題, 此外, 同步也是一個問題, 可以參考上一篇文章,
V2X 按照定義有以下四種應用情境:

其中, Platooning 和 Extended sensors 會是比較早期的應用,
(Platooning 為車行之間的資訊串流, 如大貨車間的資訊傳輸)
也是 LTE V2X 較有可能的應用, (R15 主要改進 CA, 64-QAM, CDD-MIMO)
而 Advanced driving 和 Remote driving 由於 V2I 和 QoS 的要求, 可能要到 NR V2X,
另一個有趣的應用情境, 則是使用 V2X 的環境來提供移動基地台的覆蓋,

對於 NR V2X 而言, 有以下的技術趨勢:
1. 自駕車的圖資傳輸: 提供自駕車的圖資或是深度學習模型更新
2. 車輛的無盲點定位: 0.5公尺精確度, 100 km/hr 用來做資源分配與預警
3. 在 side-link 架構下的 unicast, multicast, H-ARQ
4. 和 DSRC 的整合 (R16)
Note: 對定位的應用而言,
目前 LTE 定位精確度為 10 公尺, 在 NR 架構下, 約略可以到達 1 公尺,
GPS 的架構下, 最高精確度可以達成公分等級定位,
但是需時間較長, 同時, 也要考慮移動性的支援,
最後的應用應該會是整合 (hyper) 的定位方案.

留言
張貼留言