LTE筆記: 5G 定位的定位流程 ~4

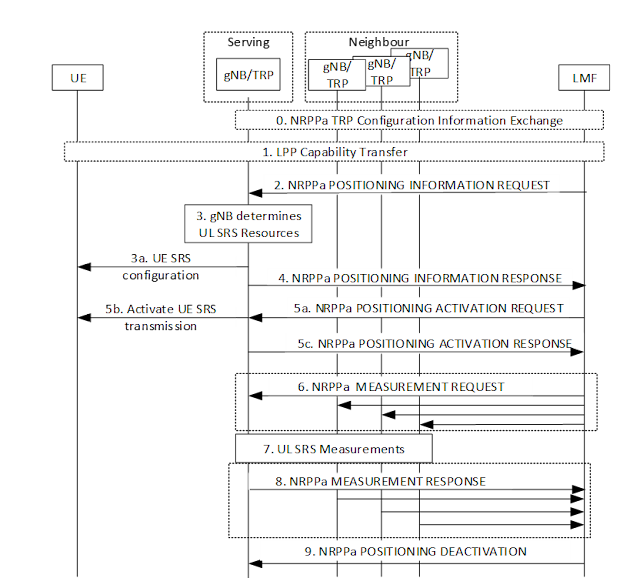
在研讀完 5G 的定位流程後, 我們來進一步看定位時所需要的量測資訊, 在這篇文章中, 我們先專注在 NRPPa 的量測資訊, 考慮到 NRPPa 是由 gNB 進行量測, 其攜帶的資訊較為簡單, 在整體定位流程中, 交換的資訊如下: 在 NRPPa 中, 所定義的交換資訊可以分成 2 類: 控制/輔助資訊: 提供定位的發起, 輔助資訊 (例: gNB 的設置) 和定位流程相關: E-CID (訊號強度), OTDOA (下行), UL-TDOA (上行) 為了取得量測的資訊, 除了要決定那些基地台進行量測, 這部分通常由一個 ANR (Automatic Neighbour Relation) 功能決定, 還需要決定量測的時機, 以及要量測的資訊, 關於量測的時機, 可以分成按需求進行量測, 或是週期量測, 其定義如下表: 在表格中, 我們可以看到不同的參數區間, 其中, 週期回報的時間區間可以從 120ms 到一小時, gNB 越常進行量測, 就可以得到越精確的定位結果, 也可以針對使用者進行追蹤等演算法改進, 但同時犧牲的就是 gNB 能來傳送資料的時間, 因此, 此數值應在定位需求與網路效能間取得平衡. 在回報的資訊部分, 則是按照 TRP 回報, TRP 為 TRansmission Points 的縮寫, 可以想像是小基地台指向性天線 (sector antenna), 如果一個基地台有多個天線, 則可以透過 TRP ID 和 Cell ID 區分, TRP 回報的資訊內容, 包括: AoA (角度), RSRP (訊號強度), RTOA, Rx-Tx Diff (時間差), 顯示於下表: